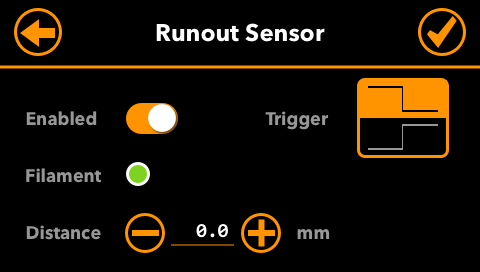
Here is an image of what the settings for the runout sensor will look like.
It will be possible to set the amount of filament to extrude before pausing when no filament are detected (it is typically the distance between your sensor and the extruder). You will be able to choose the trigger (high to low or low to high) since there are many different sensors. The filament LED is there to help you test if your sensor is properly detected.
I have finished the implementation of this new feature but I have some small bugs to fix. Version 5.1 will also be based on Marlin 2.0.9.3, currently the latest version.
I want to also fix some existing bugs in current version and check carefully some behaviors raised by some people that may be bugs. So end of this month or beginning of March.
Maybe a can give a more complete version of my answer: As far as I know Silence3D use an old version of ADVi3++, a fork of version 4. So in order to support new features of version 5 and later, they will need to adapt their fork and align it with ADVi3++. During this work, they can choose another pin for the runout sensor.
Another thing: I will not allow to change the pin from the LCD panel because it would require too many changes in Marlin and will consume more memory.
Thanks for your reply. Yes, it is a fork of ADVi3pp 4.0.6. I completely understand about limitations of the LCD.
On the surface, the complete diff between the two has some additional code for a fan mod they produce. I do not have that mod. I am trying to just isolate the changes for the steppers. For pin changing, I thought about adding logic to select the alternate pins in gcode. However, It looks like there is also a change to the driver type. So it might not be possible to support both drivers configurations in one binary without some other changes. For now I’ll research more and see if their mod can use a different pin. I’ll open a another topic if I can make something workable.
Yes they use other drivers, this how they achieve a more silent printer at the level of the stepper motors. If I remember well, they have indicated in their source code all of their modifications with something like @silence. Something like that.
So I just noticed pin 9(ground) is being used by the bl touch. Would it be ok splitting the wire into a y connector to be utilize for both the bl touch and runout sensor?